
Mission Autonomy Connectivity Planner
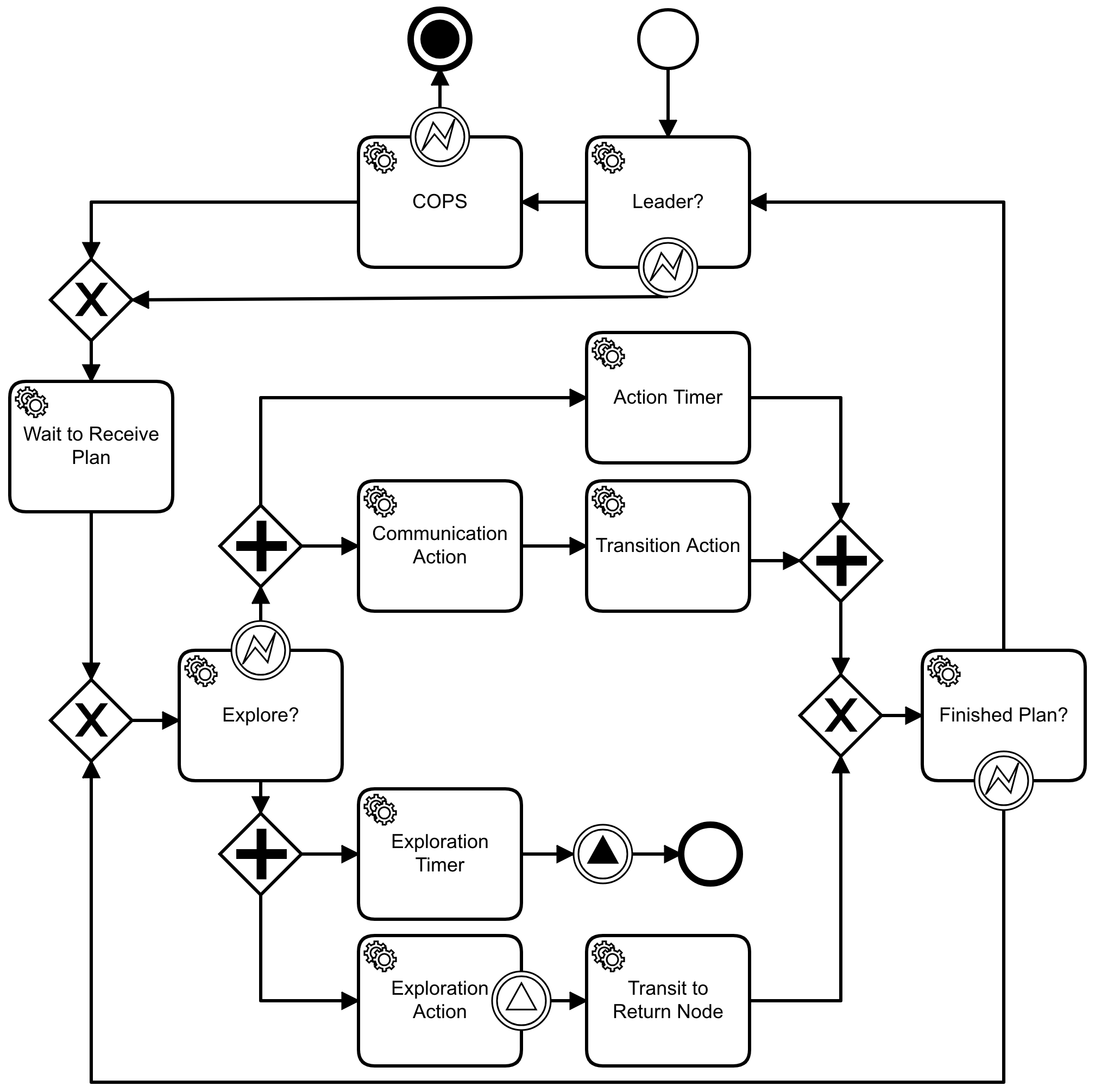
DARPA Subterranean Challenge aims to develop tecniques for exploration of subsurface structures using autonomous robots. In Intermittent Connectivity for Exploration in Communication-Constrained Multi-Agent Systems. an optimization-based connectivity-aware planner was developed and the software COPS was implemented. In this work we developed an autonomous mission execution planning software for NASA's Team Costar built on top of COPS. We develop a robust implementation with minimal communication of the plan generated by COPS. For this purpose we used NASA Jet Propulsion Laboratory’s CARACaS (Control Architecture for Robotic Agent Command and Sensing) TRACE mission executive. for execution and monitoring of processes modelled in Business Process Modelling Notation (BPMN). As opposed to modeling the information-consistent plan directly we follow a more abstract approach in which the BPMN represents the planning process as a task and the plan execution as loop processes over the list of actions in the plan. We are therefore able to execute any arbitrary plan that contains the target set of actions. The figure below shows the BPMN diagram used by each robot’s executive.
The mission execution software is implemented in ROS and simulated in a high-fidelity simulation environment. The figure below shows two Husky robots exploring a cave structure.

The methods and implementations in this work are presented in the paper Planning and Optimization for Multi-Robot Planetary Cave Exploration under Intermittent Connectivity Constraints. The research was conducted at California Institute of Technology and NASA Jet Propulsion Laboratory.