
Autonomous Overtaking Using Reachability Analysis and MPC
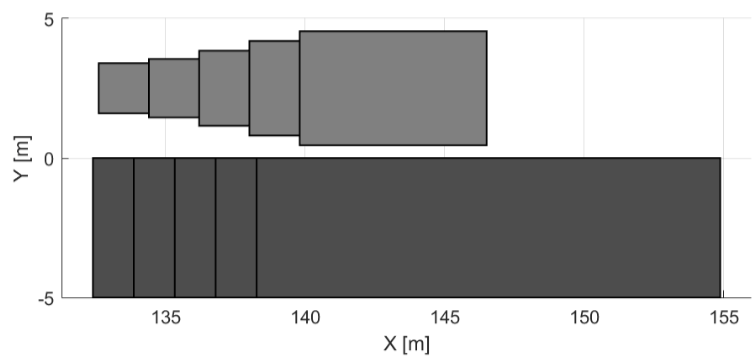
In our B.S. thesis Autonomous Overtaking Using Reachability Analysis and MPC from KTH Royal Institute of Technology we study the problem of path planning under safetfy guarantees for autonomous vehicles. The reachable sets for the vehicles are represented by polyhedra. The boundary of the set differens is used as hard state constraints in the model predictive control (MPC) formulation, therefore guaranteeing safety. The figure below show the reachable sets for two vehicles.
We predict a path using the MPC controller and track it using a PD-controller. The following figures shows the predicted trajectory and the executed trajectory.


The work is presented in our B.S. thesis paper Autonomous Overtaking Using Reachability Analysis and MPC. The research was conducted at KTH Royal Institute of Technology.